29 Oct Sensor unidad de medida Inercial (IMU) para la estimación del pico vertical de fuerza de reacción del suelo (PVGRF) y otras variables biomecánicas
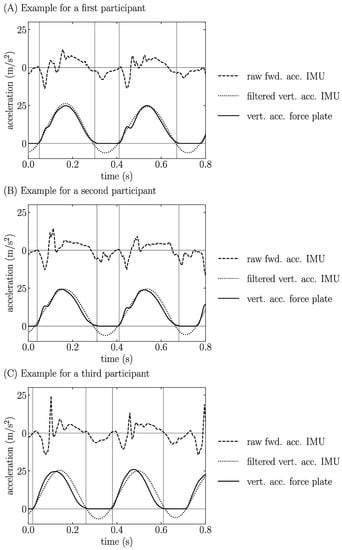
Este estudio de Patoz et al. 2022, estimó la fuerza máxima (Fz,max), tiempo de contacto en el suelo (tc) y tiempo de vuelo (tf) usando la señal de aceleración vertical registrada por una IMU montada en el sacro. La comparación entre el gold estándrad (GSM) e IMU mostró un error medio cuadrático (RMSE) de 0,15 peso corporal (BW) para Fz,max y de 20 ms para tc y tf. Estos errores fueron comparables a los obtenidos usando métodos previamente publicados sin diferencias clínicamente importantes entre GSM e IMUM. Por lo tanto, los hallazgos de este estudio respaldan el uso de la IMUM para estimar Fz,max, tc y tf para el análisis biomecánico de carrera, especialmente porque una IMU tiene la ventaja de ser de bajo costo y portátil, y por lo tanto parece muy práctico para entrenadores y profesionales sanitarios.
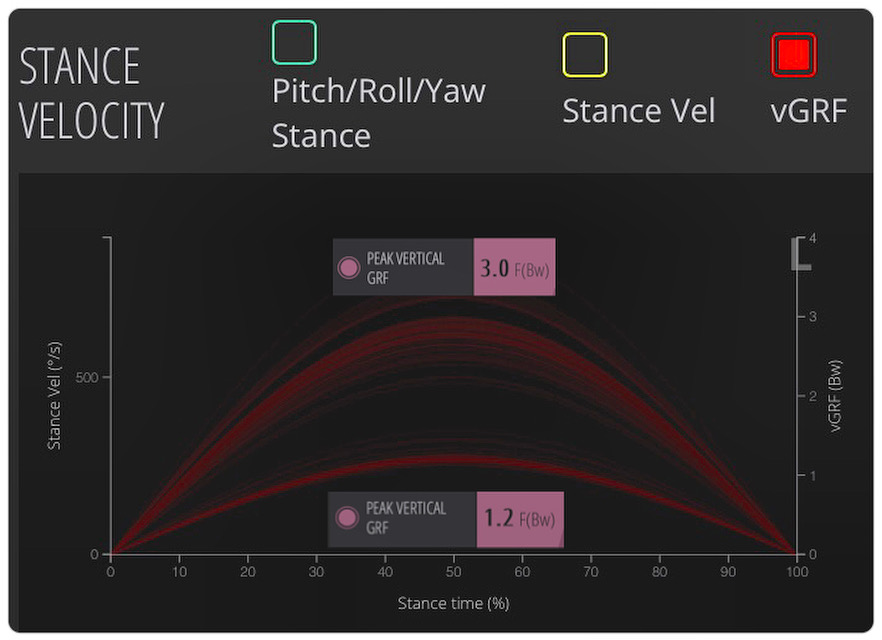
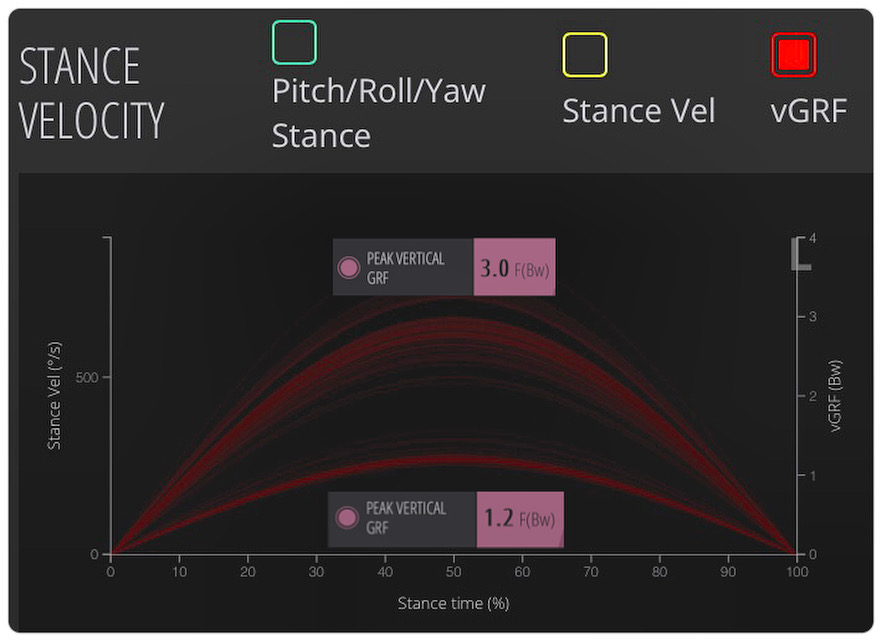
En la siguiente imagen, se muestra la estimación del pico vertical de fuerza de reacción del suelo (PVGRF) con el sensor portable IMU RunScribe corriendo y andando. Como ejemplo de caso de uso, si la persona pesa 70kg, generaría en cada zancada 210kg de fuerza contra el suelo corriendo y 84kg andando. Además, esta fuerza es realizada en fase media de apoyo, por lo que la convierte en el foco del análisis biomecánico.